Physics Notes Class 11
Notes of Physics Central Board of Secondary Education, Delhi
Units and Measurements
Measurement of physical quantities
Physics is a quantitative science, based on measurement of physical quantities. Certain physical quantities have been chosen as fundamental or base quantities. The fundamental quantities that are chosen are Length, Mass, Time, electric current, thermodynamic temperature, amount of substance, and luminous intensity.
Base quantity and Fundamental Units
Each base quantity is defined in terms of a certain basic arbitrarily chosen but properly standardized reference standard called unit (such as meter, kilogram, second, ampere, Kelvin, mole, and candela. The units for the fundamental base quantities are called fundamental or base units and two supplementary units in relation to quantities plane angle and solid angle radian, Ste radian..
|
S.No. |
Fundamental Quantities |
Fundamental Units |
Symbol |
|
1. |
Length |
meters |
m |
|
2. |
Mass |
kilogram |
kg |
|
3. |
Time |
second |
S |
|
4. |
Temperature |
Kelvin |
kg |
|
5 |
Electric current |
ampere |
A |
|
6 |
Luminous intensity |
candela |
cd |
|
7 |
Amount of substance |
mole |
mol |
Derived units
Other physical quantities derived from the base quantities can be expressed as a combination of the base units and are called derived units. A complete set of units both fundamental and derived units are called a system of units. Example: - volume, density etc
International System of units
The International System of units based on seven base units is at present internationally accepted unit system and is widely used throughout the world. In computing any physical quantity the units for derived quantities involved in the relationships are treated as though they were algebraic quantities till the desired units are obtained
- >
- CGS SystemIn this system, the unit of length is centimeter, the unit of mass is gram and the unit of time is second.
- FPS SystemIn this system, the unit of length is foot, the unit of mass is pound and the unit of time is second.
- MKS SystemIn this system, the unit of length is meter, the unit of mass is kilogram and the unit of time is second.
- SI SystemThis system contains seven fundamental units and two supplementary fundamental units. The SI units are used in all physical measurements, for both the base quantities and the derived quantities obtained from them. Certain derived units are expressed by means of SI units of special names such as joule, Newton, watt etc.
In computing any physical quantity the units for derived quantities involved in the relationships are treated as though they were algebraic quantities till the desired units are obtained
In SI system that is System International d’ Units there is 7 base units’ and two supplementary units.
|
S.No. |
Supplementary Fundamental Quantities |
Supplementary Unit |
Symbol |
|
1 |
Plane angle |
radian |
rad |
|
2 |
Solid angle |
steradian |
Sr |
Direct and indirect methods can be used for the measurement of physical quantities. In measured quantities while expressing the result, the accuracy and precision of measuring instruments along with errors in measurement should be taken into account.
In measured and computed quantities proper significant figures only should be retained.
Use of Dimensional analysis
* The dimensions of base quantities and combination of these dimensions describe the nature of physical quantities .Dimensional analysis can be used to check the dimensional consistency of equations, deducing relations among physical quantities etc. A dimensionally consistent equation need not be actually an exact equation, but a dimensionally wrong or inconsistent equation must be wrong.
Error
The uncertainty in the measurement of a physical quantity is called an error.
The errors in measurement can be classified as (i) Systematic errors and (ii) Random errors
SYSTEMATIC ERRORS:
These are the errors that tend to be either positive or negative. Sources of systematic errors are
(i) Instrumental errors
(ii) Imperfection in experimental technique or procedure
(iii) Personal errors
RANDOM ERRORS :
Those errors which occur irregularly .These errors arise due to unpredictable fluctuations in experimental conditions
Least count error
Least count error is the error associated with the resolution of the instrument.
Absolute error
The magnitude of the difference between the individual measurement and the true value of the quantity is called the absolute error of the measurement.
Mean Absolute Error
The arithmetic mean of all the absolute errors is taken as the final or mean absolute error of the value of the physical quantity a. It is represented by Δa mean
Relative error - it is the ratio of the mean absolute error to the true value.
Relative error = Δa mean/ a mean
Percentage Error : When the relative error is expressed in per cent, it is called the percentage error (δa).
Percentage error =( Δa mean/ a mean) ×100
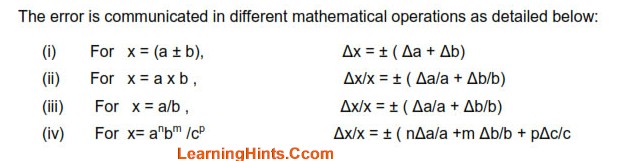
COMBINATION OF ERRORS
ERROR OF A SUM OR A DIFFERENCE
When two quantities are added or subtracted, the absolute error in the final result is thesums of the absolute errors in the individual quantities.
IF Z=A+ B then the max possible error in Z, ?Z =?A + ?B
IF Z=A- B then the max possible error in Z, ?Z =?A + ?B
ERROR OF A PRODUCT OR A QUOTIENT
When two quantities are multiplied or divided the relative error is the sum of the relative errors in the multipliers
Suppose Z= A*B or Z=A/B then the max relative error in ‘Z’ = ?Z/Z= (?A/A) + (?B/B)
ERROR IN CASE OF A QUANTITY RAISED TO A POWER
The relative error in a physical quantity raised to the power k is the k times the relative
error in the individual quantity.
Suppose Z = Ak
then ?Z/Z = K (?A/A)
Significant figures: -
The significant figures are normally those digits in a measured quantity which are known reliably plus one additional digit that is uncertain.
For counting of the significant figure rule are as:
(i) All non- zero digits are significant figure.
(ii) All zero between two non-zero digits are significant figure.
(iii) All zeros to the right of a non-zero digit but to the left of an understood decimal point are not significant. But such zeros are significant if they come from a measurement.
(iv) All zeros to the right of a non-zero digit but to the left of a decimal point are significant.
(v) All zeros to the right of a decimal point are significant.
(vi) All zeros to the right of a decimal point but to the left of a non-zero digit are not significant. Single zero conventionally placed to the left of the decimal point is not significant.
(vii) The number of significant figures does not depend on the system of units.
Addition or subtraction with significant figure :-
In addition or subtraction , the result should be reported to the same number of decimal places as that of the number with minimum number of decimal places.
For ex: A= 334.5 kg; B= 23.45Kg then A + B =334.5 kg + 23.43 kg = 357.93 kg
The result with significant figures is 357.9 kg
Multiplication and division in significant figure :-
In multiplication or division, the result should be reported to the same number of significant figures as that of the number with minimum of significant figures.
Accuracy in measurement
Accuracy refers to the closeness of a measurement to the true value of the physical quantity and precision refers to the resolution or the limit to which the quantity is measured. The accuracy of a measurement is a measure of how close the measured value is to the true value of the quantity.
Precision
Precision tells us to what limit the quantity is measured.
ROUNDING OFF:
While rounding off measurements the following rules are applied
Rule I: If the digit to be dropped is smaller than 5,then the preceding digit should be left unchanged. For ex: 9.32 is rounded off to 9.3
Rule II: If the digit to be dropped is greater than 5, then the preceding digit should be raised by 1 For ex: 8.27 is rounded off to 8.3
Rule III: If the digit to be dropped is 5 followed by digits other than zero, then the preceding digit should be raised by 1
For ex: 9.351 on being rounded off to first decimal, becomes 9.4
Rule IV: If the digit to be dropped is 5 or 5 followed by zeros, then the preceding digit is not changed if it is even, is raised by 1 if it is odd. For ex:
5.45, on being rounded off,become 5.4
5.450 on being rounded off, becomes 5.4
7.35 , on being rounded off, becomes 7.4
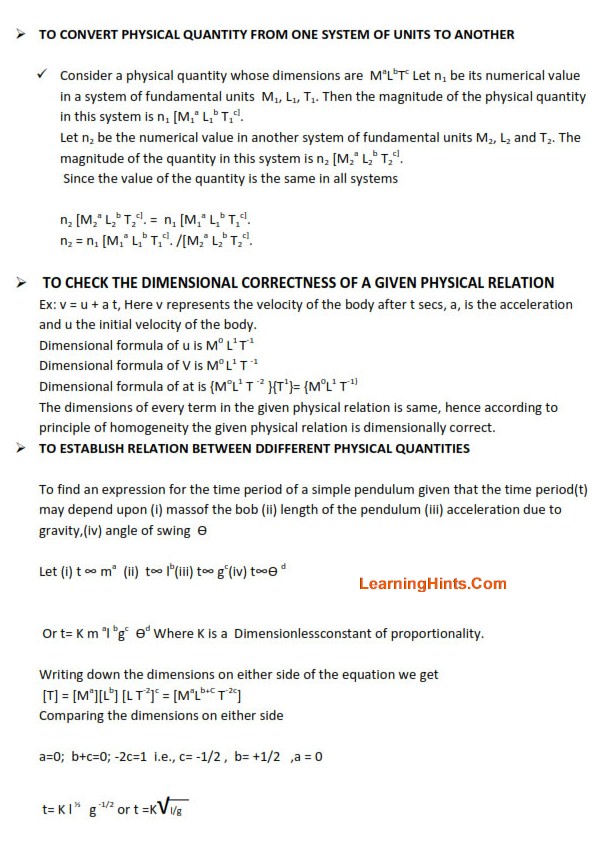
DIMENSIONS, DIMENSIONAL FORMULA AND DIMENSIONAL EQUATION
(1)Dimensions of a derived unit are the powers to which the fundamental units of mass, length
and time etc. must be raised to represent that unit.
(2)Dimensional formula is an expression which shows how and which of the fundamental units
are required to represent the unit of a physical quantity.M1L1T-2 is the dimensional formula of Force.
CATEGORIES PHYSICAL QUANTITIES
Dimensional Costants: These are the quantities which possess dimensions and have a fixed value.
Ex: Gravitational Constant
Dimensional Variables: These are the quantities which possess dimensions and do not have a fixed value
For ex: velocity, acceleration etc.
Dimensionless Constants: these are the quantities which do not possess dimensions and have a fixed value.
For ex: πetc.
Dimensionless Variables: These are the quantities which are dimensionless and do not have a fixed value.
For ex: Strain, Specific Gravity etc.
Importance of dimensional analysis
A given physical relation is dimensionally correct if the dimensions of the various terms on either side of the relation are the same.
USES OF DIMENSIONAL EQUATIONS
LIMITATIONS OF DIMENSIONAL ANALYSIS
* It supplies no information about dimensionless constants. They have to be determined either by experiment or by mathematical investigation.
* This method applicable only in the case of power functions. It fails in case of
exponential and trigonometric relations.
* It fails to derive a relation which contains two or more than two quantities of like nature.
* It can only check whether a physical relation is dimensionally correct or not. It cannot tell whether the relation is absolutely correct or not
* It cannot identify all the factors on which the given physical quantity depends upon.
Motion in a straight
Motion:-
Rest and Motion are relative terms; nobody can exist in a state of absolute rest or of absolute motion.
One dimensional motion:-
The motion of an object is said to be one dimensional motion if only one out of three coordinates specifying the position of the object change with time. In such a motion an object moves along a straight line path.
Two dimensional motions:-
The motion of an object is said to be two dimensional motions if two out of three coordinates specifying the position of the object change with time. In such motion the object moves in a plane.
Three dimensional motions:-
The motion is said to be three dimensional motion if all the three coordinates specifying the position of an object change with respect to time , in such a motion an object moves in space.
Path length:-
The path length traversed by an object between two points is not the same as the magnitude of displacement always. The displacement depends only on the end points; whereas the path length depends on the actual path. The two quantities are equal only if the object does not change its direction during the course of its motion. In all other cases, the path length is greater than the magnitude of displacement.
Average speed:-
The average speed of an object is greater than or equal to the magnitude of the average velocity over a given interval of time. The two are equal only if the path length is equal to the magnitude of the displacement.
Displacement
A displacement is the shortest distance from the initial to the final position of a point P. Thus, it is the length of an imaginary straight path, typically distinct from the path actually travelled by P. A displacement vector represents the length and direction of this imaginary straight path.
The magnitude of displacement is less than or equal to the actual distance travelled by the object in the given time interval.
Displacement ≤ Actual distance
Speed
It is rate of change of distance covered by the body with respect to time.
Speed = Distance travelled /time taken
Speed is a scalar quantity.
Its unit is meter /sec.
Dimensional formula of speed is [M0L1 T -1 ] .
It is positive or zero but never negative.
Uniform Speed:-
If an object covers equal distances in equal intervals of time than the speed of the moving object is called uniform speed. In this type of motion, position – time graph is always a straight line.
Instantaneous speed:-
The speed of an object at any particular instant of time is called instantaneous speed. In this measurement, the time ?t→0. When a body is moving with uniform speed its instantaneous speed = Average speed = uniform speed.
Velocity:-
The rate of change of position of an object in a particular direction with respect to time is called velocity. It is equal to the displacement covered by an object per unit time.
Velocity =Displacement /Time
Velocity is a vector quantity
its SI unit is meter per sec.
Its dimensional formula is [M0L1 T -1 ].
It may be negative, positive or zero.
When a body moves in a straight line then the average speed and average velocity are equal.
Acceleration:-
The rate of change of velocity of an object with respect to time is called its acceleration.
Acceleration = Change in velocity /time taken
It is a vector quantity,
Its SI unit is meter/ sec2
Its dimension is [M0L1 T -2 ].
It may be positive , negative or zero.
Positive Acceleration:-
If the velocity of an object increases with time, its acceleration is positive.
Negative Acceleration:-
If the velocity of an object decreases with time, its acceleration is negative. The negative acceleration is also called retardation or deceleration.
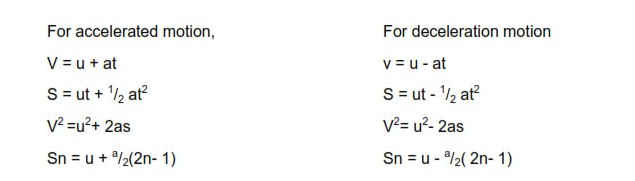
Formulas of uniformly accelerated motion along straight line
Free fall:-
In the absence of the air resistance all bodies fall with the same acceleration towards earth from a small height. This is called free fall. The acceleration with which a body falls is called gravitational acceleration (g).Its value is 9.8 m/sec2 .
Relative Motion:-
The rate of change of distance of one object with respect to the other is called relative velocity. The relative velocity of an object B with respect to the object A when both are in motion is the rate of change of position of object B with respect to the object A.
Relative velocity of object A with respect to object B, VAB = VA - VB
When both objects are move in same direction, then the relative velocity of object B with respect to the object A,
VBA = VB - VA
When the object B moves in opposite direction of object A .
VBA = VB + VA
Motion in a Plane
Scalar Quintiles:-
The quantities which have magnitude only but no direction. For example: mass, length, time, speed , temperature etc.
Vector Quantities:-
The quantities which have magnitude as well as direction and obeys vector laws of addition, multiplication etc. For examples: Displacement, velocity, acceleration, force, momentum etc.
Addition of Vectors:-
(i) Only vectors of same nature can be added.
(ii) The addition of two vector A and B is resultant R
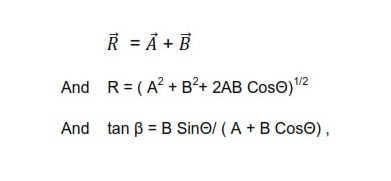
Where Θ is the angle between vector A and vector B, And β is the angle which R makes with the direction of A.
(iii) Vector addition is commutative A + B = B+A
(iv) Vector addition is associative, A+ (B +C ) = (A +B )+C
(v) R is maximum if Θ = 0 and minimum if Θ = 180 + 0 .
Subtraction of two vectors:-
(i) Only vector of same nature can be subtracted.
(ii) Subtraction of B from A = vector addition of A and (-B),
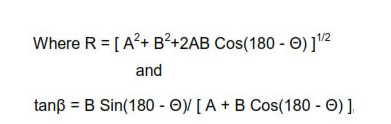
Where Θ is the angle between A and B and β is the angle which R makes with the direction of A.
(iii) Vector addition is commutative A + B ≠ B+A
(iv) Vector addition is associative, A+ (B +C ) ≠ (A +B )+C
Rectangular components of a vector in a plane :-
If A makes an angle Θ with x-axis and Ax and By be the rectangular components of A along X-axis and Y- axis respectively.
Then A= A x + By= y
Here A x =A CosΘ and B y = ASinΘ
Dot product or scalar product : -
The dot product of two vectors A and B, represented by . is a scalar , which is equal to the product of the magnitudes of A and B and the Cosine of the smaller angle between them. If Θ is the smaller angle between A and B, then AB= AB
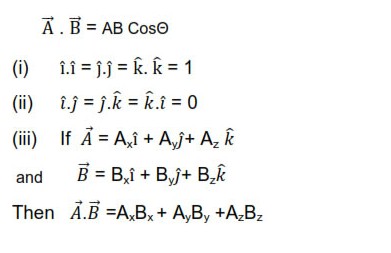
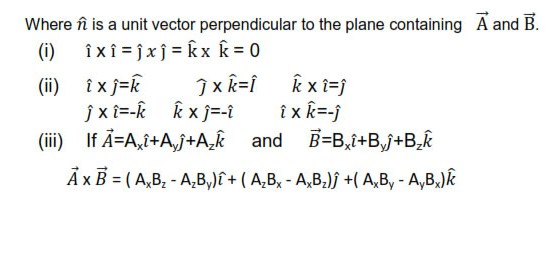
Cross or Vector product:-
The cross product of two vectors and , represented by x is a vector , which is equal to the product of the magnitudes of A and B and the sine of the smaller angle between them. If Θ is the smaller angle between A and B, then = AB Sinθ
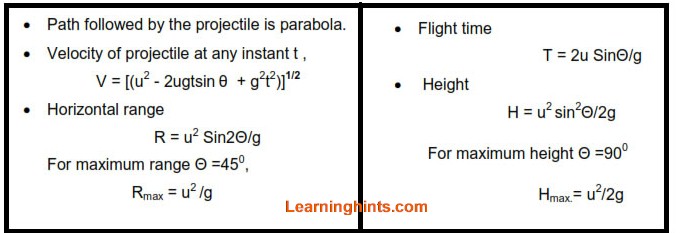
Projectile motion: -
Projectile is the name given to anybody which once thrown in to space with some initial velocity, moves thereafter under the influence of gravity alone without being propelled by any engine or fuel. The path followed by a projectile is called its trajectory.
CIRCULAR MOTION
Circular Motion –
When a body moves such that it always remains at a fixed distance from a fixed point then its motion is said to be circular motion. The fixed distance is called the radius of the circular path and the fixed point is called the center of the circular path.
Uniform circular motion:-
When an object follows a circular path at constant speed. The motion of the object is called uniform circular motion.
The magnitude of its acceleration is a c = v2/R.
The direction of a c is always towards the centre of the circle.
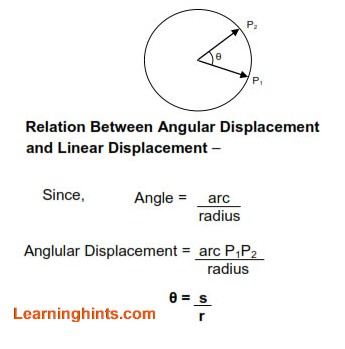
Angular Displacement –
Angle swept by the radius vector of a particle moving on a circular path is known as angular displacement of the particle. Example: – angular displacement of the particle from P1 to P2 is θ.
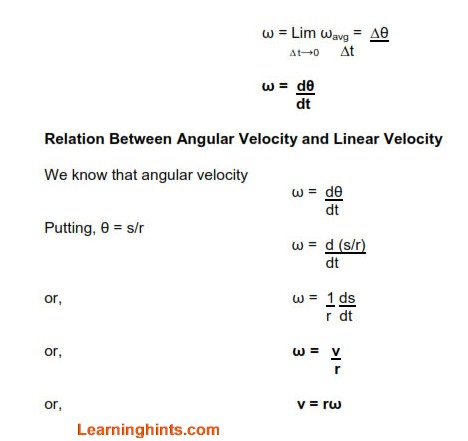
Angular speed:-
The angular speed is the rate of change of angular distance.
It is related velocity v by V =ω R. The acceleration is ac= ω2R.
If T is the time period of revolution of the object in circular motion and ν is the frequency then we have ω = 2πνV = 2πνR and acceleration a= 4π2 ν 2 R
Instantaneous Angular Velocity –
Angular velocity of a body at some particular instant of time is known as instantaneous angular velocity.
Or
Average angular velocity evaluated for very short duration of time is known as instantaneous angular velocity.
Time Period of Uniform Circular Motion –
Total time taken by the particle performing uniform circular motion to complete one full circular path is known as time period. In one time period total angle rotated by the particle is 2π and time period is T. Hence angular velocity
Frequency -
Number of revolutions made by the particle moving on circular path in one second is known as frequency.
f = 1/T = ω/2π
Centripetal Acceleration –
When a body performs uniform circular motion its speed remains constant but velocity continuously changes due to change of direction. Hence a body is continuously accelerated and the acceleration experienced by the body is known as centripetal acceleration (that is the acceleration directed towards the center).
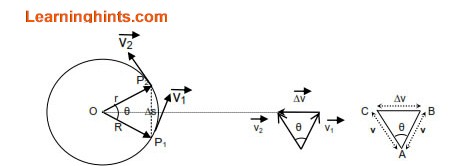
Consider a particle performing uniform circular motion with speed v. When the particle changes its position from P1 to P2. its velocity changes from v1 to v2 due to change of direction. The change in velocity from P1 to p2is ?v which is directed towards the center of the circular path according to triangle law of subtraction of vectors.

Since the change of velocity is directed towards the center of the circular path, the acceleration responsible for the change in velocity is also directed towards center of circular path and hence it is known as centripetal acceleration.
Centripetal force:-
Centripetal force is the name given to the force that provides inward radial acceleration to a body in circular motion. We should always look for some material force like tension, gravitational force, electrical force, friction etc. as the centripetal force.
Physical Application of Centripetal Force
i)Case - 1 Circular motion of a stone tied to a string. Centripetal force is provided by the tension of the string
- >
- ii) Case - 2 Circular motion of electron around the nucleus. Centripetal force is provided by the electrostatic force of attraction between the positively charged nucleus and negatively charged electron
iii) Case - 3 Circular motion of planets around sun or satellites around planet. Centripetal force is provided by the gravitational force of attraction between the planet and sun
- >
- iv) Case - 4 Circular motion of vehicles on a horizontal road. Centripetal force is provided by the static frictional force between the road and the tyre of the vehicle.
- vi) Case - 6 Circular motion of mud particles sticking to the wheels of the vehicle. Centripetal force is provided by the adhesive force of attraction between the mud particles and the tyres of the vehicle. At very high speed when adhesive force is unable to provide necessary centripetal force, the mud particles fly off tangentially. In order to prevent the particles from staining our clothes, mud-guards are provided over the wheels of vehicle.
vii) Case - 7 Circular motion of a train on a horizontal track. Centripetal force is provided by the horizontal component of the reaction force applied by the outer track on the inner projection of the outer wheels
Laws of Motion
Newton’s 1st law or Law of Inertia
Everybody continues to be in its state of rest or of uniform motion until and unless and until it is compelled by an external force to change its state of rest or of uniform motion.
Inertia
The property by virtue of which a body opposes any change in its state of rest or of uniform motion is known as inertia. Greater the mass of the body greater is the inertia. That is mass is the measure of the inertia of the body.
Numerical Application If, F = 0 ; u = constant ( In the absence of external applied force velocity of body remains unchanged.)
Physical Application of inertia or Newton’s first law
- >
- When a moving bus suddenly stops, passenger’s head gets jerked in the forward direction.
2. When a stationery bus suddenly starts moving passenger’s head gets jerked in the backward direction.
3. On hitting used mattress by a stick, dust particles come out of it.
4. In order to catch a moving bus safely we must run forward in the direction of motion of bus.
5. Whenever it is required to jump off a moving bus, we must always run for a short distance after jumping on road to prevent us from falling in the forward direction.
Newton’s Second law of motion:
It states that the rate of change of momentum of a body is proportional to the applied force and takes place in the direction in which force acts.
Thus F= k dp/dt= k ma
Derivation of second laws of motion

⇒ The second law is consistent with the First law (F=0 implies a=0)
⇒ It is a vector equation
⇒ It is applicable to a particle, and also to a body or a system of particles, provided F the total external force on the system and a is the acceleration of the system as a whole.
⇒ F at a point at a certain instant determines acceleration at the same point at that instant. Acceleration at an instant does not depend on the history of motion’
⇒ Force is not always in the direction of motion .Depending on the situation F may belong V, opposite to v, normal to v, or may make some other angle with v. In every case it is parallel to acceleration.
⇒ If v=0 at an instant, i.e., if a body is momentarily at rest, it does not mean that force or acceleration are necessarily zero at that instant. For ex: When a ball thrown upward reaches its maximum height, but the force continues to be its weight ‘mg‘ and the acceleration is ‘g’ the acceleration due to gravity.
Note :- Above result is not Newton’s second law rather it is the conditional result obtained from it, under the condition when m = constant.
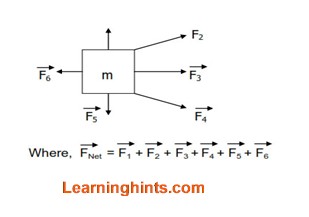
Numerical Application:
acceleration, a = F Net / M
Where F Net is the vector resultant of all the forces acting on the body
Physical Application
- >
- i) Case - 1 Body kept on horizontal plane is at rest.
For vertical direction
N = mg(since body is at rest) - ii) Body kept on horizontal plane is accelerating horizontally under single horizontal force.
For vertical direction
N = mg (since body is at rest)
For horizontal direction
F = ma
iii) Body kept on horizontal plane is accelerating horizontally towards right under two horizontal forces. (F1> F2)
For vertical direction
N = mg (since body is at rest)
For horizontal direction F1 - F2= ma
Tension
Tension In A Light String Force applied by any linear object such as string, rope, chain, rod etc. is known as it’s tension. Since string is a highly flexible object so it can only pull the object and can never push. Hence tension of the string always acts away from the body to which it is attached irrespective of the direction.
Physical Application of Tension
- >
- i) Flexible wire holding the lamp pulls the lamp in upward direction and pulls the point of suspension in the downward direction.
- ii) Rope holding the bucket in the well pulls the bucket in the upward direction and the pulley in the downward direction.
iii) Rope attached between the cattle and the peg pulls the cattle towards the peg and peg towards the cattle.
- >
- iv) When a block is pulled by the chain, the chain pulls the block in forward direction and the person holding the chain in reverse direction.
In case of light string, rope, chain, rod etc. tension is same all along their lengths.
Consider a point P on a light (mass less) string. Let tensions on either side of it be T1 and T2 respectively and the string be accelerating towards left under these forces. Then for point P2
T1 - T2 = ma
Since string is considered to be light mass m of point P is zero or, T = 0
or, T1 - T2 = ma
T1= T2
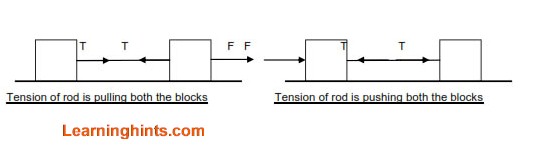
Tension of A light Rigid Rod
Force applied by rod is also known as its tension. Since rod is rigid, it cannot bend like string. Hence rod can pull as well as push. Tension of rod can be of pulling as well as pushing nature but one at a time. Tension of a rod attached to the body may be directed towards as well as away from the body.
Physical Application of tension :-
- >
- i) Pillars supporting the house pushes the house in the upward direction and pushes the ground in the downward direction.
- ii) Wooden bars used in the chair pushes the ground in the downward direction and pushes the seating top in the upward direction.
iii) Parallel bars attached to the ice-cream trolley pushes the trolley in the forward direction and pushes the ice-cream vendor in the backward direction.(when the trolley is being pushed by the vendor)
- >
- iv) Rod holding the ceiling fan pulls the fan in the upward direction and pulls the hook attached to the ceiling in the downward direction.
- v) Parallel rods attached between the cart and the bull pulls the cart in the forward direction and pulls the bull in the backward direction.
Fixed Pulley
It is a simple machine in the form of a circular disc or rim supported by spokes having groove at its periphery. It is free to rotate about an axis passing through its center and perpendicular to its plane.
Key Point
In case of light pulley, tension in the rope on both the sides of the pulley is same (to be proved in the rotational mechanics)
Newton’ 3rd law or Law of Action and Reaction
Every action is opposed by an equal and opposite reaction.
or
For every action there is an equal and opposite reaction.
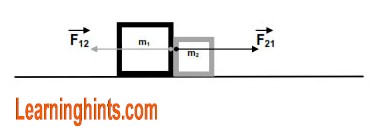
F12 is the force on the first body (m1 ) due to second body (m2 )
F21 is the force on the second body (m2) due to first body (m1)
If F12 is action then F21 reaction and if F21 is action then F12 reaction.
Numerical Application
Force on the first body due to second body (F12 ) is equal and opposite to the force on the second body due to first body (F21 ).
F21 = - F12
Physical Application
- >
- i) When we push any block in the forward direction then block pushes us in the backward direction with an equal and opposite force.
- ii) Horse pulls the rod attached to the cart in the forward direction and the tension of the rod pulls the cart in the backward direction.
iii) Earth pulls the body on its surface in vertically downward direction and the body pulls the earth with the same force in vertically upward direction.
- >
- iv) While walking we push the ground in the backward direction using static frictional force and the ground pushes us in the forward direction using static frictional force.
- v) When a person sitting on the horse whips the horse and horse suddenly accelerates, the saddle on the back of the horse pushes the person in the forward direction using static frictional force and the person pushes the saddle in the backward direction using static frictional force.
Note – Normal reaction of the horizontal surface on the body is not the reaction of the weight of the body because weight of the body is the force with which earth attracts the body towards its center, hence its reaction must be the force with which body attracts earth towards it.
Linear Momentum
It is defined as the quantity of motion contained in the body. Mathematically it is given by the product of mass and velocity. It is a vector quantity represented by p.
p = mv
Principle Of Conservation Of Linear Momentum
It states that in the absence of any external applied force total momentum of a system remains conserved. Proof- We know that,

Physical Application of law of conservation of momentum :-
- >
- i) Recoil of gun – when bullet is fired in the forward direction gun recoils in the backward direction.
- ii) When a person jumps on the boat from the shore of river, boat along with the person on it moves in the forward direction.
iii) When a person on the boat jumps forward on the shore of river, boat starts moving in the backward direction.
- >
- iv) In rocket propulsion fuel is ejected out in the downward direction due to which rocket is propelled up in vertically upward direction.
Recoil of gun
Let mass of gun be mg and that of bullet be m . Initially both are at rest, hence their initial momentum is zero.
pi = mgug + mbub = 0
Finally when bullet rushes out with velocity vg, gun recoils with velocity vb, hence their final momentum is
pf = mgvg + mb vb
Since there is no external applied force, from the principal of conservation of linear momentum
pi = pf
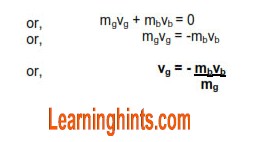
From above expression it must be clear that
- >
- Gun recoils opposite to the direction of motion of bullet.
- Greater is the mass of mullet mbor velocity of bullet vbgreater is the recoil of the gun.
- Greater is the mass of gun mg, smaller is the recoil of gun.
Impulse and Impulsive Force
ImpulsiveForce
The force which acts on a body for very short duration of time but is still capable of changing the position, velocity and direction of motion of the body up to large extent is known as impulsive force.
Example -
- >
- Force applied by foot on hitting a football.
- Force applied by boxer on a punching bag.
- Force applied by bat on a ball in hitting it to the boundary.
- Force applied by a moving truck on a drum.
Note- Although impulsive force acts on a body for a very short duration of time yet its magnitude varies rapidly during that small duration.
Impulse
Impulse received by the body during an impact is defined as the product of average impulsive force and the short time duration for which it acts.
I = Favg× t
Relation Between Impulse and Linear Momentum
Consider a body being acted upon by an impulsive force, this force changes its magnitude rapidly with the time. At any instant if impulsive force is F then elementary impulse imparted to the body in the elementary time dt is given by
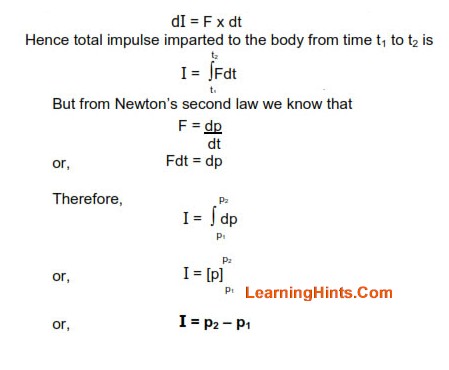
Hence impulse imparted to the body is equal to the change in its momentum.
Graph Between Impulsive Force and Time
With the time on x axis and impulsive force on y axis the graph of the following nature is obtained.
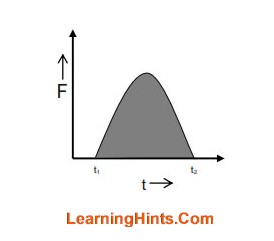
Area enclosed under the impulsive force and time graph from t1to t2 gives the impulse imparted to the body from time t1 to t 2.
Physical Application of Impulsive Force
- >
- i) While catching a ball a player lowers his hand to save himself from getting hurt.
- ii) Vehicles are provided with the shock absorbers to avoid jerks.
iii) Buffers are provided between the bogies of the train to avoid jerks.
- >
- iv) A person falling on a cemented floor receive more jerk as compared to that falling on a sandy floor.
- v) Glass wares are wrapped in a straw or paper before packing.
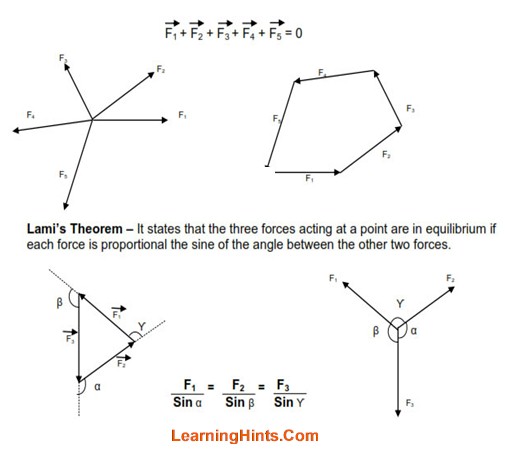
Equilibrium of Concurrent Forces
If the number of forces act at the same point, they are called concurrent forces. The condition or the given body to be in equilibrium under the number of forces acting on the body is that these forces should produce zero resultant. The resultant of the concurrent forces acting on a body will be zero if they can be represented completely by the sides of a closed polygon taken in order.
FRICTION
Friction - The property by virtue of which the relative motion between two surfaces in contact is opposed is known as friction.
Frictional Forces - Tangential forces developed between the two surfaces in contact, so as to oppose their relative motion are known as frictional forces or commonly friction.
Types of Frictional Forces
- Frictional forces are of three types :-
1. Static frictional force
2. Kinetic frictional force
3. Rolling frictional force
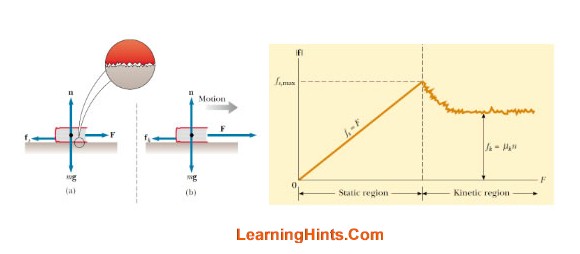
Static Frictional Force -
Frictional force acting between the two surfaces in contact which are relatively at rest, so as to oppose their relative motion, when they tend to move relatively under the effect of any external force is known as static frictional force. Static frictional force is a self adjusting force and its value lies between its minimum value up to its maximum value.
Minimum value of static frictional force -
Minimum value of static frictional force is zero in the condition when the bodies are relatively at rest and no external force is acting to move them relatively.
fs(min) = 0
Maximum value of static frictional force -
Maximum value of static frictional force is µsN (where µs is the coefficient of static friction for the given pair of surface and N is the normal reaction acting between the two surfaces in contact) in the condition when the bodies are just about to move relatively under the effect of external applied force.
fs(max) = µsN
Therefore, fs(min) ≤ fs ≤ fs(max)
or, 0 ≤ fs ≤ µsN
Kinetic Frictional Force -
Frictional force acting between the two surfaces in contact which are moving relatively, so as to oppose their relative motion, is known as kinetic frictional force. It’s magnitude is almost constant and is equal to µkN where µk is the coefficient of kinetic friction for the given pair of surface and N is the normal reaction acting between the two surfaces in contact. It is always less than maximum value of static frictional force.
fk = µkN Since,
fk < fs(max) = µsN
Therefore, µkN < µsN
or, µk < µs
Limiting Frictional Force –
The maximum value of static frictional force is the maximum frictional force which can act between the two surfaces in contact and hence it is also known as limiting frictional force.
Laws of Limiting Frictional Force –
- >
- Static friction depends upon the nature of the surfaces in contact.
- It comes into action only when any external force is applied to move the two bodies relatively, with their surfaces in contact.
- Static friction opposes the impending motion.
- It is a self adjusting force.
- The limiting frictional force is independent of the area of contact between the two surfaces.
Cause of Friction
Old View -
The surfaces which appear to be smooth as seen through our naked eyes are actually rough at the microscopic level. During contact, the projections of one surface penetrate into the depressions of other and vice versa. Due to which the two surfaces in contact form a saw tooth joint opposing their relative motion. When external force is applied so as to move them relatively this joint opposes their relative motion. As we go on increasing the external applied force the opposition of saw tooth joint also goes on increasing up to the maximum value known as limiting frictional force (µs N) after which the joint suddenly breaks and the surfaces start moving relatively. After this the opposition offered by the saw tooth joint slightly decreases and comes to rest at almost constant value (µkN)
Modern View –
According to modern theory the cause of friction is the atomic and molecular forces of attraction between the two surfaces at their actual point of contact. When any body comes in contact with any other body then due to their roughness at the microscopic level they come in actual contact at several points. At these points the atoms and molecules come very close to each other and intermolecular force of attraction start acting between them which opposes their relative motion.
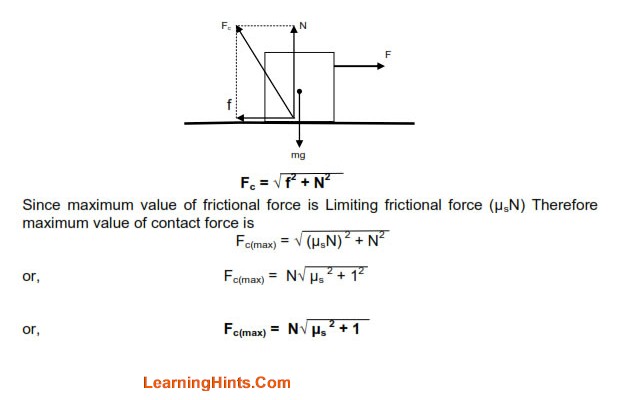
Contact Force -
The forces acting between the two bodies due to the mutual contact of their surfaces are known as contact forces. The resultant of all the contact forces acting between the bodies is known as resultant contact force. Example friction (f) and normal reaction (N) are contact forces and their resultant (Fc) is the resultant is the resultant contact force.
Rolling Frictional Force -
Frictional force which opposes the rolling of bodies (like cylinder, sphere, ring etc.) over any surface is called rolling frictional force. Rolling frictional force acting between any rolling body and the surface is almost constant and is given by µr N. Where µ is coefficient of rolling friction and N is the normal reaction between the rolling body and the surface
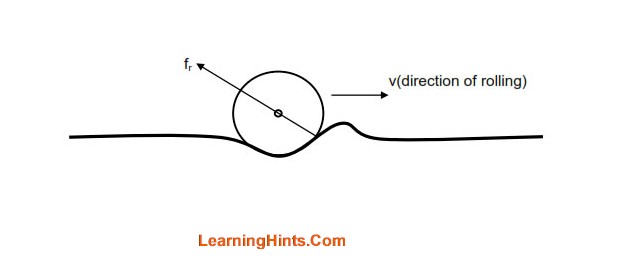
Cause of Rolling Friction –
When anybody rolls over any surface it causes a little depression and a small hump is created just ahead of it. The hump offers resistance to the motion of the rolling body, this resistance is rolling frictional force. Due to this reason only, hard surfaces like cemented floor offers less resistance as compared to soft sandy floor because hump created on a hard floor is much smaller as compared to the soft floor.
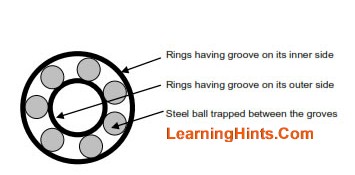
Need to Convert Kinetic Friction into Rolling Friction –
Of all the frictional forces rolling frictional force is minimum. Hence in order to avoid the wear and tear of machinery it is required to convert kinetic frictional force into rolling frictional force and for this reason we make the use of ball-bearings.
Friction:
A Necessary Evil –
Although frictional force is a non-conservative force and causes lots of wastage of energy in the form of heat yet it is very useful to us in many ways. That is why it is considered as a necessary evil.
Advantages of Friction -
- >
- i) Friction is necessary in walking. Without friction it would have been impossible for us to walk.
- ii) Friction is necessary for the movement of vehicles on the road. It is the static frictional force which makes the acceleration and retardation of vehicles possible on the road.
iii) Friction is helpful in tying knots in the ropes and strings.
- >
- iv) We are able to hold anything with our hands by the help of friction only.
Disadvantages of Friction -
- >
- i) Friction causes wear and tear in the machinery parts.
- ii) Kinetic friction wastes energy in the form of heat, light and sound.
iii) A part of fuel energy is consumed in overcoming the friction operating within the various parts of machinery.
Methods to Reduce Friction –
- >
- i) By polishing – Polishing makes the surface smooth by filling the space between the depressions and projections present in the surface of the bodies at microscopic level and there by reduces friction.
- ii) By proper selection of material – Since friction depends upon the nature of material used hence it can be largely reduced by proper selection of materials.
iii) By lubricating – When oil or grease is placed between the two surfaces in contact, it prevents the surface from coming in actual contact with each other. This converts solid friction into liquid friction which is very small.
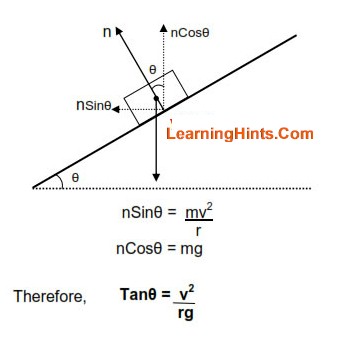
Banking of Roads
In case of horizontal road necessary centripetal force mv2/r is provided by static frictional force. When heavy vehicles move with high speed on a sharp turn (small radius) then all the factors contribute to huge centripetal force which if provided by the static frictional force may result in the fatal accident. To prevent this roads are banked by lifting their outer edge. Due to this, normal reaction of road on the vehicle gets tilted inwards such that it’s vertical component balances the weight of the body and the horizontal component provides the necessary centripetal force.
Motion in a Plane
Those physical quantities which require magnitude as well as direction for their complete representation and follows vector laws are called vectors.
Vector can be divided into two types
- >
- Polar Vectors
These are those vectors which have a starting point or a point of application as a displacement, force etc.
- start="2">
- Axial Vectors
These are those vectors which represent rotational effect and act along the axis of rotation in accordance with right hand screw rule as angular velocity, torque, angular momentum etc.
Scalars
Those physical quantities which require only magnitude but no direction for their complete representation, are called scalars.
Distance, speed, work, mass, density, etc are the examples of scalars. Scalars can be added, subtracted, multiplied or divided by simple algebraic laws.
Tensors
Tensors are those physical quantities which have different values in different directions at the same point.
Moment of inertia, radius of gyration, modulus of elasticity, pressure, stress, conductivity, resistivity, refractive index, wave velocity and density, etc are the examples of tensors. Magnitude of tensor is not unique.
Different Types of Vectors
(i) Equal Vectors Two vectors of equal magnitude, in same direction are called equal vectors.
(ii) Negative Vectors Two vectors of equal magnitude but in opposite directions are called negative vectors.
(iii) Zero Vector or Null Vector A vector whose magnitude is zero is known as a zero or null vector. Its direction is not defined. It is denoted by 0.
Velocity of a stationary object, acceleration of an object moving with uniform velocity and resultant of two equal and opposite vectors are the examples of null vector.
(iv) Unit Vector A vector having unit magnitude is called a unit vector.
A unit vector in the direction of vector A is given by
 = A / A
A unit vector is unitless and dimensionless vector and represents direction only.
(v) Orthogonal Unit Vectors The unit vectors along the direction of orthogonal axis, i.e., X – axis, Y – axis and Z – axis are called orthogonal unit vectors. They are represented by
(vi) Co-initial Vectors Vectors having a common initial point, are called co-initial vectors.
(vii) Collinear Vectors Vectors having equal or unequal magnitudes but acting along the same or Ab parallel lines are called collinear vectors.
(viii) Coplanar Vectors Vectors acting in the same plane are called coplanar vectors.
(ix) Localised Vector A vector whose initial point is fixed, is called a localised vector.
(x) Non-localised or Free Vector A vector whose initial point is not fixed is called a non- localised or a free vector.
(xi) Position Vector A vector representing the straight line distance and the direction of any point or object with respect to the origin, is called position vector.
Addition of Vectors
- >
- Triangle Law of ectors
If two vectors acting at a point are represented in magnitude and direction by the two sides of a triangle taken in one order, then their resultant is represented by the third side of the triangle taken in the opposite order.
If two vectors A and B acting at a point are inclined at an angle θ, then their resultant
R = √A2 + B2 + 2AB cos θ
If the resultant vector R subtends an angle β with vector A, then
tan β = B sin θ / A + B cos θ
- start="2">
- Parallelogram Law of ectors
If two vectors acting at a point are represented in magnitude and direction by the two adjacent sides of a parallelogram draw from a point, then their resultant is represented in magnitude and direction by the diagonal of the parallelogram draw from the same point.
Resultant of vectors A and B is given by
√A2 + B2 + 2AB cos θ
If the resultant vector R subtends an angle β with vector A, then
tan β = B sin θ / A + B cos θ
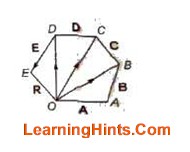
Polygon Law of ectors
It states that if number of vectors acting on a particle at a time are represented in magnitude and – direction by the various sides of an open polygon taken in same order, their resultant vector E is represented in magnitude and direction by the closing side of polygon taken in opposite order. In fact, polygon law of vectors is the outcome of triangle law of vectors.
R = A + B + C + D + E
OE = OA + AB + BC + CD + DE
Properties of Vector dition
(i) Vector addition is commutative, i.e., A + B = B + A
(ii) Vector addition is associative, i.e.,
A +(B + C)= B + (C + A)= C + (A + B)
(iii) Vector addition is distributive, i.e., m (A + B) = m A + m B
Rotation of a Vector
(i) If a vector is rotated through an angle 0, which is not an integral multiple of 2 π, the vector changes.
(ii) If the frame of reference is rotated or translated, the given vector does not change. The components of the vector may, however, change.
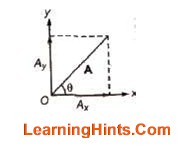
Resolution of a Vector into Rectangular Components
If any vector A subtends an angle θ with x-axis, then its
Horizontal component Ax = A cos θ
Vertical component Ay = A sin θ
Magnitude of vector A = √Ax2 + Ay2
tan θ = Ay / Ax
Direction Cosines of a ector
If any vector A subtend angles α, β and γ with x – axis, y – axis and z – axis respectively and its components along these axes are Ax, Ay and Az, then
cos α= Ax / A, cos β = Ay / A, cos γ = Az / A
and cos2 α + cos2 β + cos2 γ = 1
Subtraction of Vectors
Subtraction of a vector B from a vector A is defined as the addition of vector -B (negative of vector B) to vector A
Thus, A – B = A + (-B)
Multiplication of a Vector
- >
- By a Real Number
When a vector A is multiplied by a real number n, then its magnitude becomes n times but direction and unit remains unchanged.
- start="2">
- By a Scalar
When a vector A is multiplied by a scalar S, then its magnitude becomes S times, and unit is the product of units of A and S but direction remains same as that of vector A.
Scalar or Dot Product of Two ectors
The scalar product of two vectors is equal to the product of their magnitudes and the cosine of the smaller angle between them. It is denoted by . (dot).
A * B = AB cos θ
The scalar or dot product of two vectors is a calar.
Properties of Scalar Product
(i) Scalar product is commutative, i.e., A * B= B * A
(ii) Scalar product is distributive, i.e., A * (B + C) = A * B + A * C
(iii) Scalar product of two perpendicular vectors is zero.
A * B = AB cos 90° = O
(iv) Scalar product of two parallel vectors is equal to the product of their magnitudes, i.e., A * B = AB cos 0° = AB
(v) Scalar product of a vector with itself is equal to the square of its magnitude, i.e.,
A * A = AA cos 0° = A2
(vi) Scalar product of orthogonal unit vectors
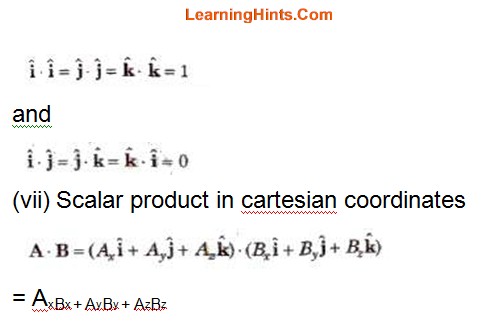
Vector or Cross Product of Two Vectors
The vector product of two vectors is equal to the product of their magnitudes and the sine of the smaller angle between them. It is denoted by * (cross).
A * B = AB sin θ n
The direction of unit vector n can be obtained from right hand thumb rule.
If fingers of right hand are curled from A to B through smaller angle between them, then thumb will represent the direction of vector (A * B).
The vector or cross product of two vectors is also a vector.
Properties of Vector Product
(i) Vector product is not commutative, i.e.,
A * B ≠ B * A [∴ (A * B) = — (B * A)]
(ii) Vector product is distributive, i.e.,
A * (B + C) = A * B + A * C
(iii) Vector product of two parallel vectors is zero, i.e.,
A * B = AB sin O° = 0
(iv) Vector product of any vector with itself is zero.
A * A = AA sin O° = 0
(v) Vector product of orthogonal unit vectors

Direction of Vector Cross Product
When C = A * B, the direction of C is at right angles to the plane containing the vectors A and B. The direction is determined by the right hand screw rule and right hand thumb rule.
(i) Right Hand Screw Rule Rotate a right handed screw from first vector (A) towards second vector (B). The direction in which the right handed screw moves gives the direction of vector (C).
(ii) Right Hand Thumb Rule Curl the fingers of your right hand from A to B. Then, the direction of the erect thumb will point in the direction of A * B.